Publications
2025
-
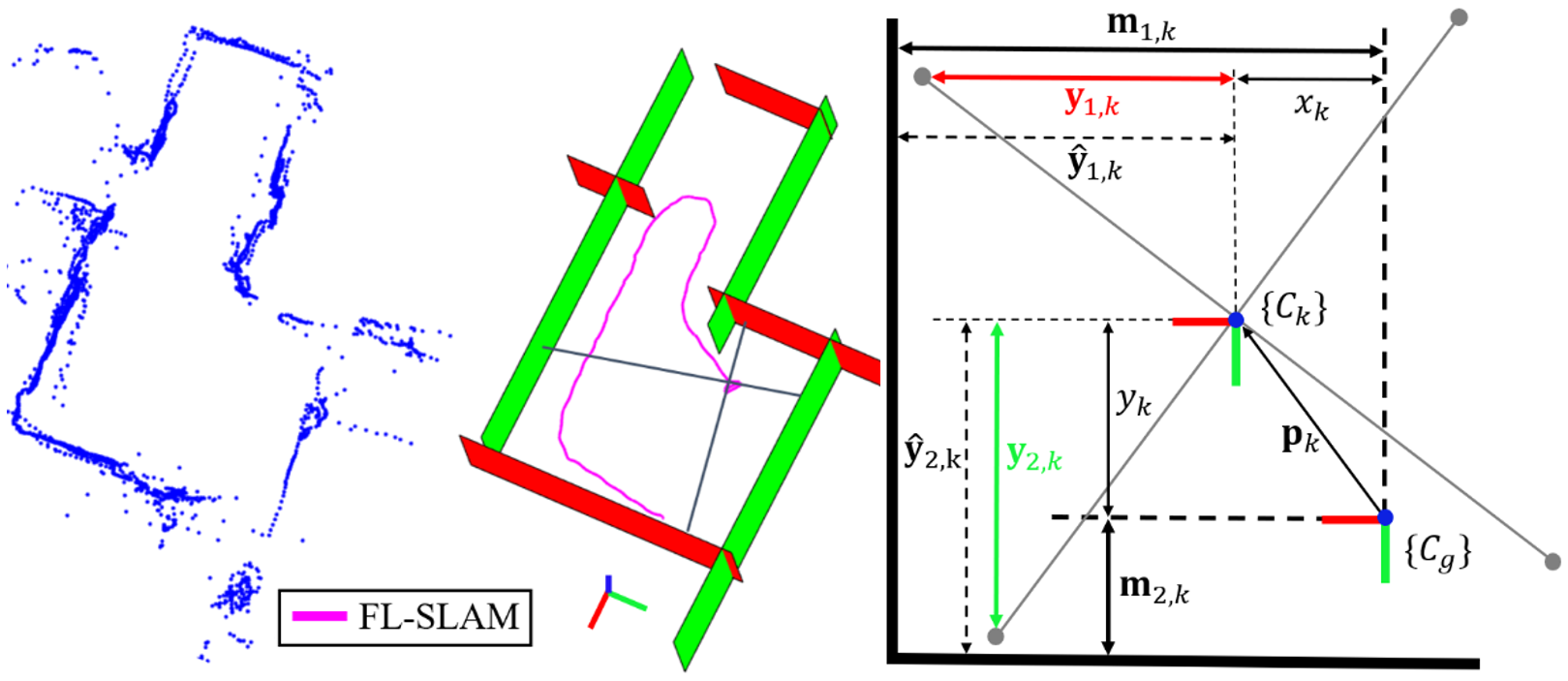
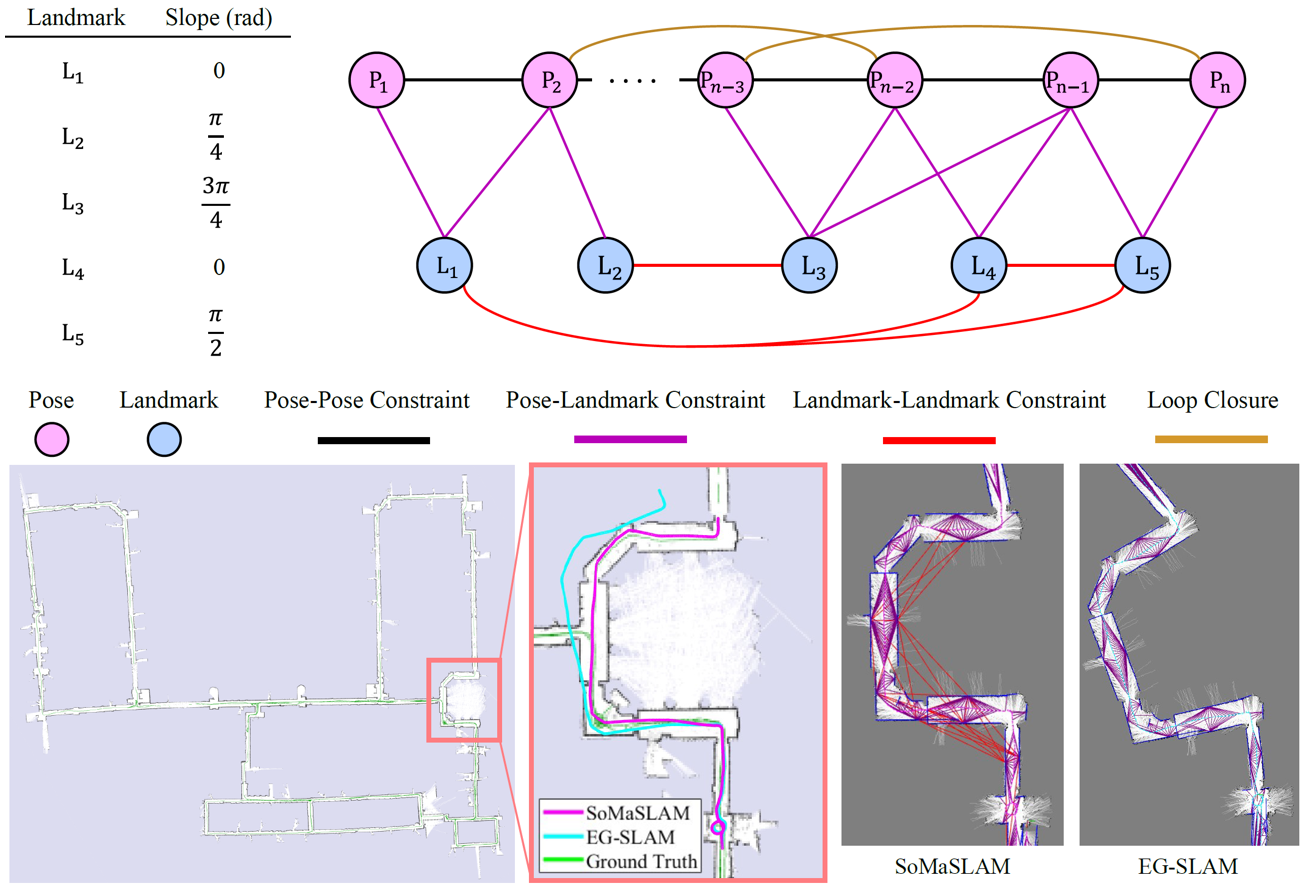 SoMaSLAM: 2D Graph SLAM for Sparse Range Sensing with Soft Manhattan World ConstraintsIEEE Robotics and Automation Letters (RA-L), 2025[Project Page] [Paper]
SoMaSLAM: 2D Graph SLAM for Sparse Range Sensing with Soft Manhattan World ConstraintsIEEE Robotics and Automation Letters (RA-L), 2025[Project Page] [Paper] -
 SPLiCE: Single-Point LiDAR and Camera Calibration & Estimation Leveraging Manhattan WorldIn IEEE International Conference on Intelligent Robots and Systems (IROS), 2025[Project Page] [Paper]
SPLiCE: Single-Point LiDAR and Camera Calibration & Estimation Leveraging Manhattan WorldIn IEEE International Conference on Intelligent Robots and Systems (IROS), 2025[Project Page] [Paper] -
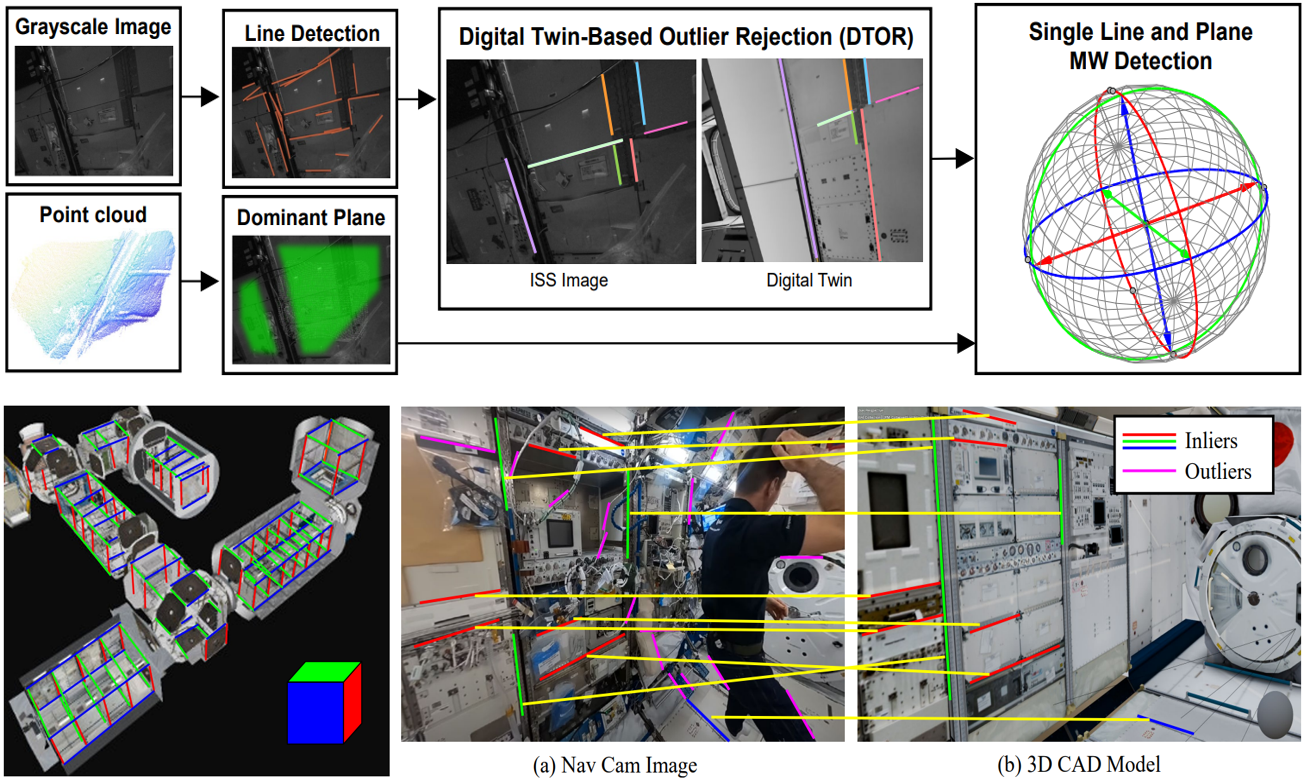 Drift-Free Visual Compass Leveraging Digital Twins for Cluttered EnvironmentsIn IEEE 2nd Space Robotics Workshop (SRW), 2025
Drift-Free Visual Compass Leveraging Digital Twins for Cluttered EnvironmentsIn IEEE 2nd Space Robotics Workshop (SRW), 2025
2024
-
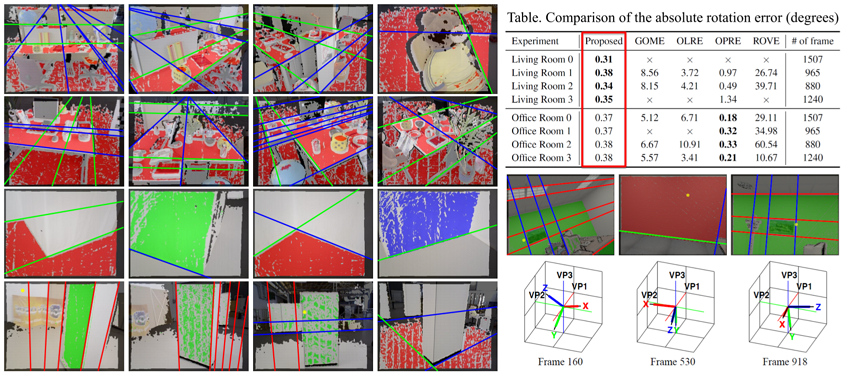
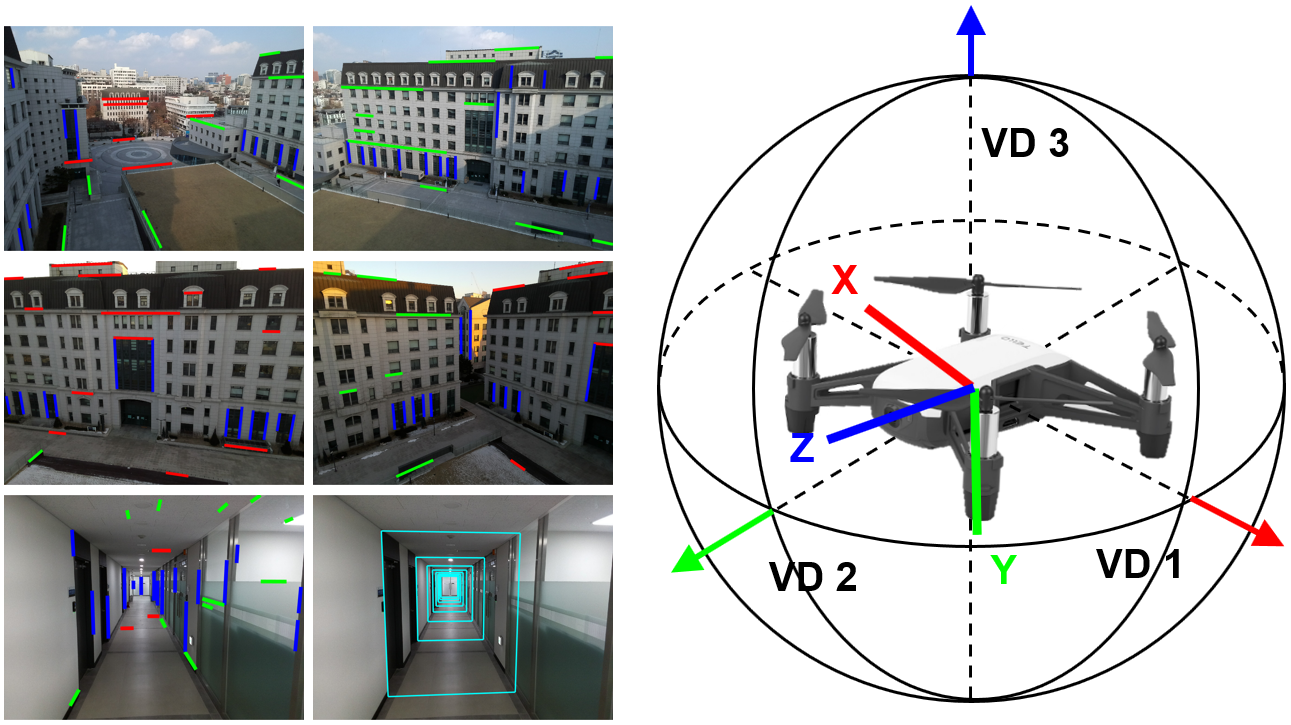
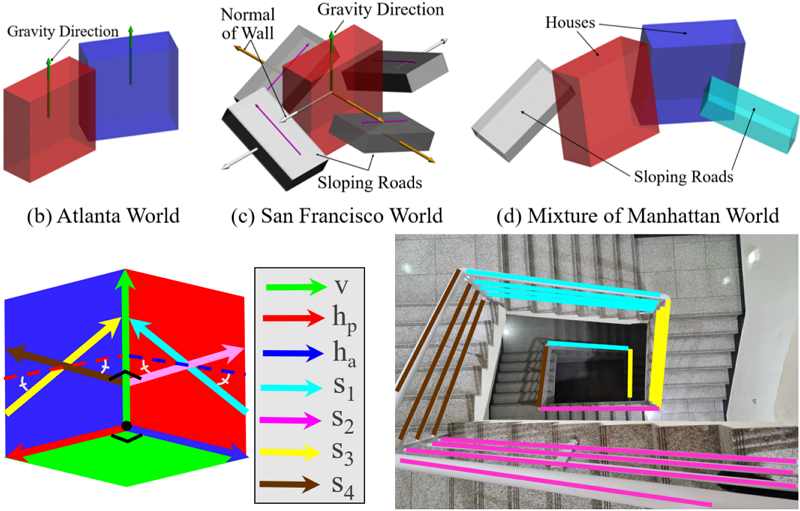 San Francisco World: Leveraging Structural Regularities of Slope for 3-DoF Visual CompassIEEE Robotics and Automation Letters (RA-L), 2024
San Francisco World: Leveraging Structural Regularities of Slope for 3-DoF Visual CompassIEEE Robotics and Automation Letters (RA-L), 2024 -
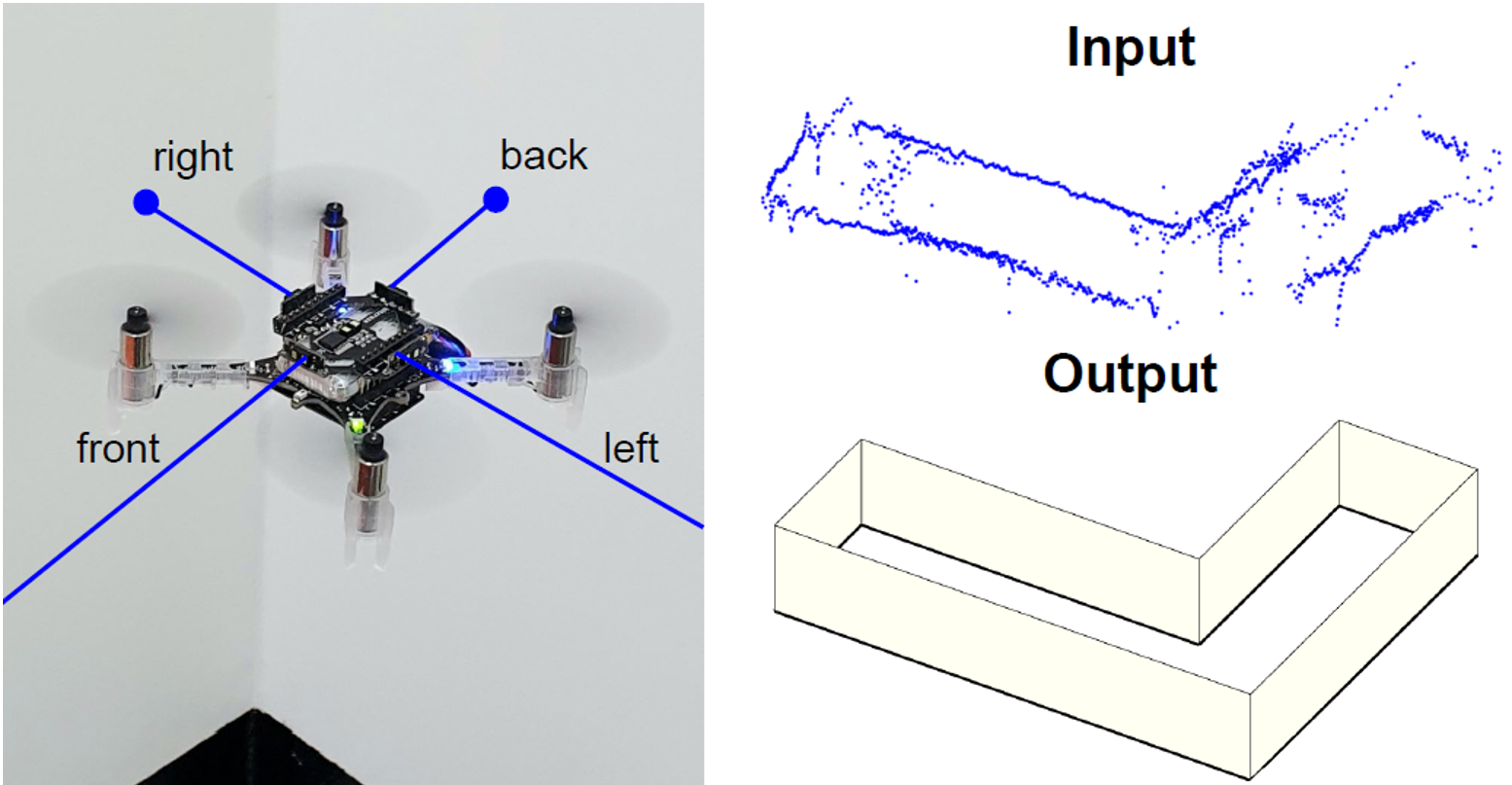
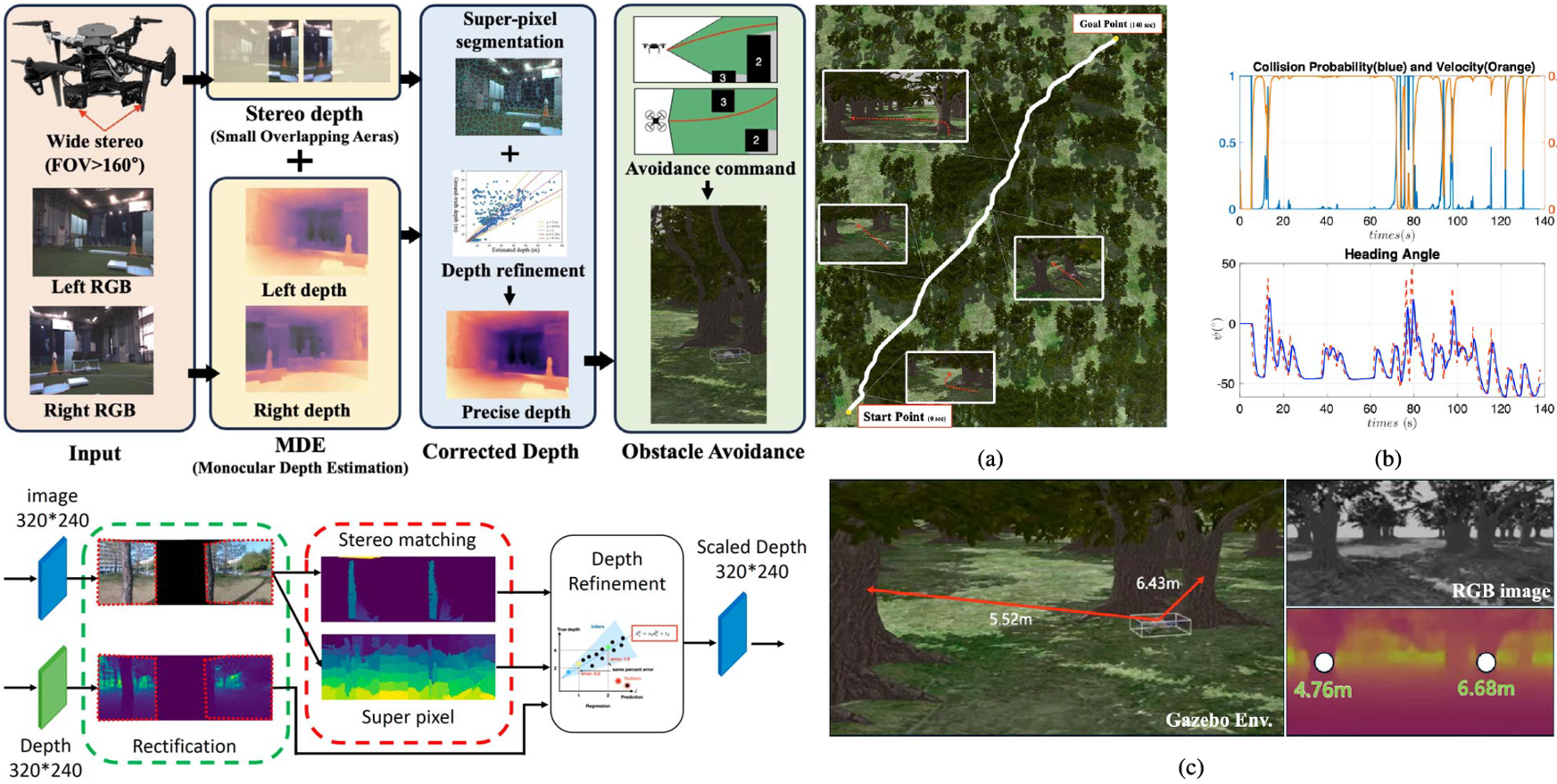 Obstacle Avoidance of a UAV Using Fast Monocular Depth Estimation for a Wide Stereo CameraIEEE Transactions on Industrial Electronics (T-IE), 2024[Paper]
Obstacle Avoidance of a UAV Using Fast Monocular Depth Estimation for a Wide Stereo CameraIEEE Transactions on Industrial Electronics (T-IE), 2024[Paper] -
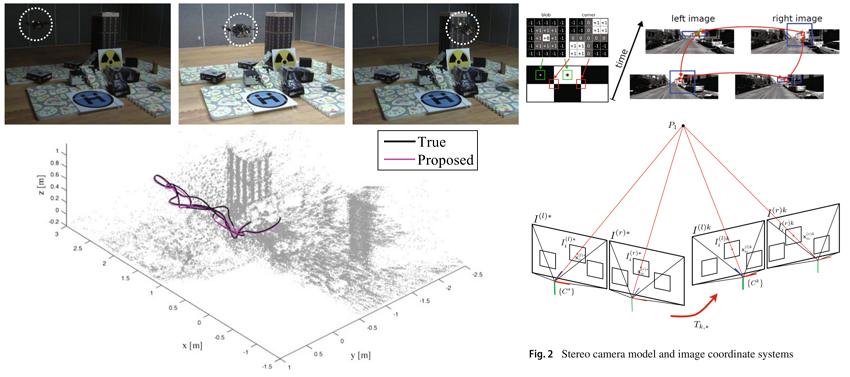
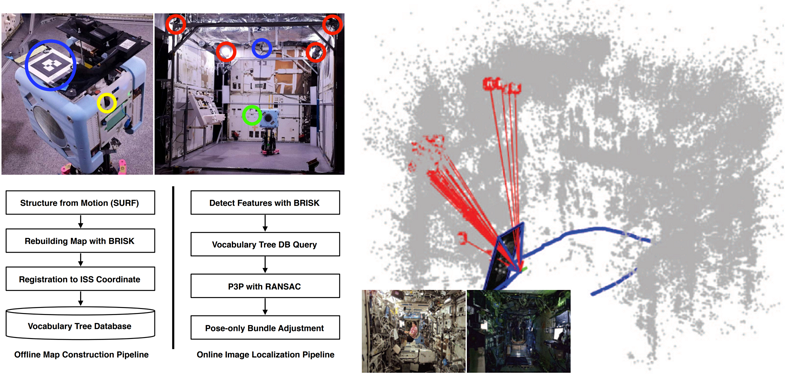
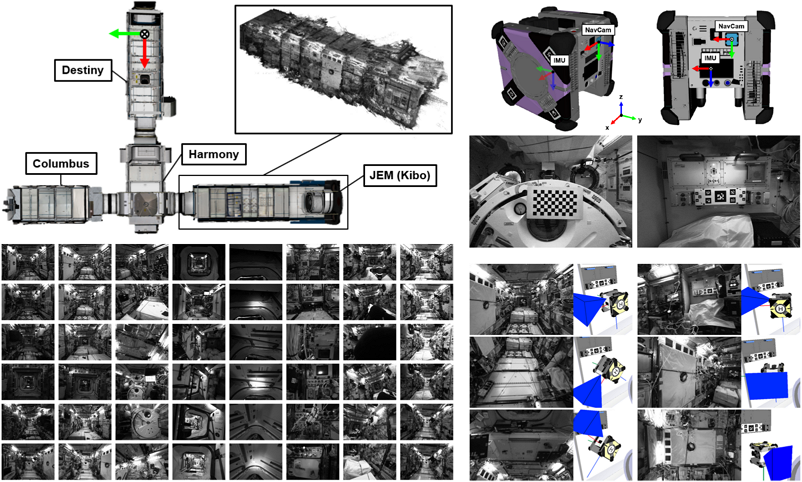 Astrobee ISS Free-Flyer Datasets for Space Intra-Vehicular Robot Navigation ResearchIEEE Robotics and Automation Letters (RA-L), 2024[Project Page] [Paper]
Astrobee ISS Free-Flyer Datasets for Space Intra-Vehicular Robot Navigation ResearchIEEE Robotics and Automation Letters (RA-L), 2024[Project Page] [Paper]
2023
-
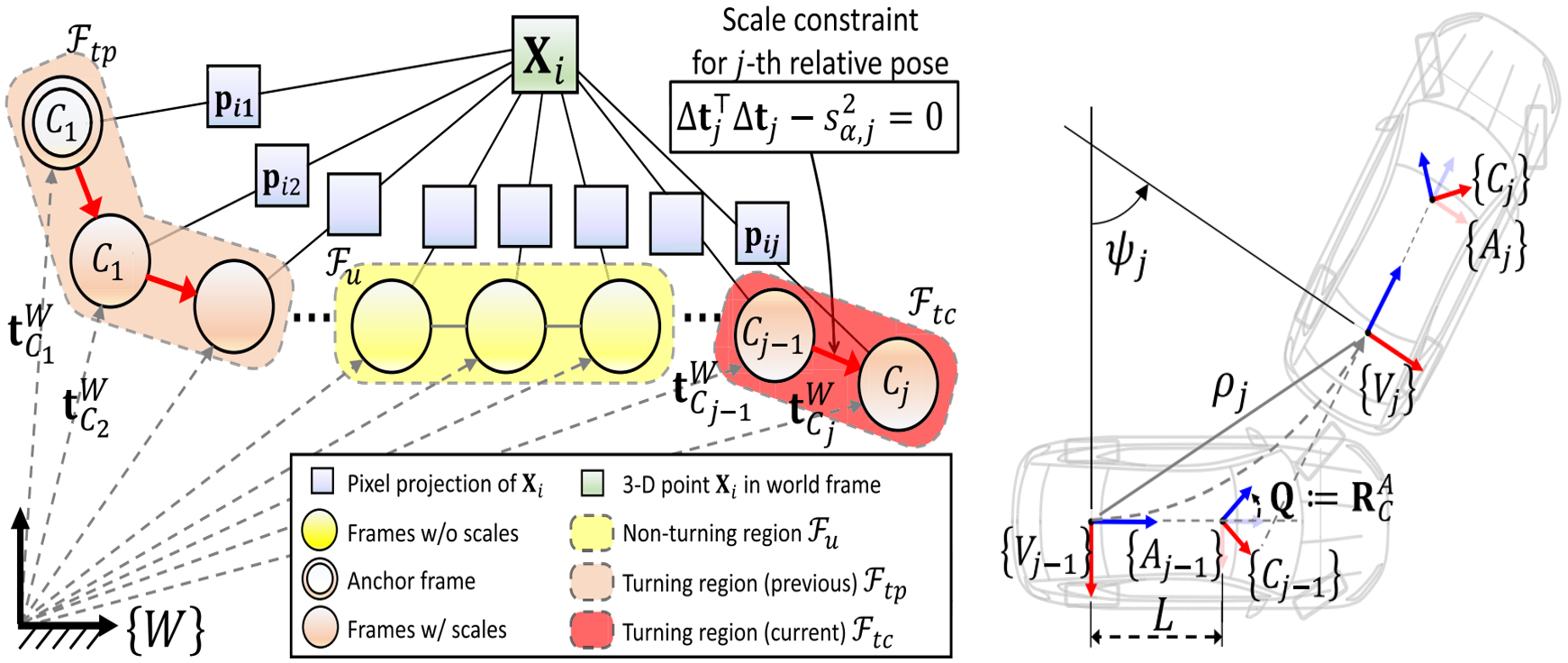 Scale-Aware Monocular Visual Odometry and Extrinsic Calibration Using Vehicle KinematicsIEEE Transactions on Intelligent Transportation Systems (T-ITS), 2023[Paper]
Scale-Aware Monocular Visual Odometry and Extrinsic Calibration Using Vehicle KinematicsIEEE Transactions on Intelligent Transportation Systems (T-ITS), 2023[Paper] -
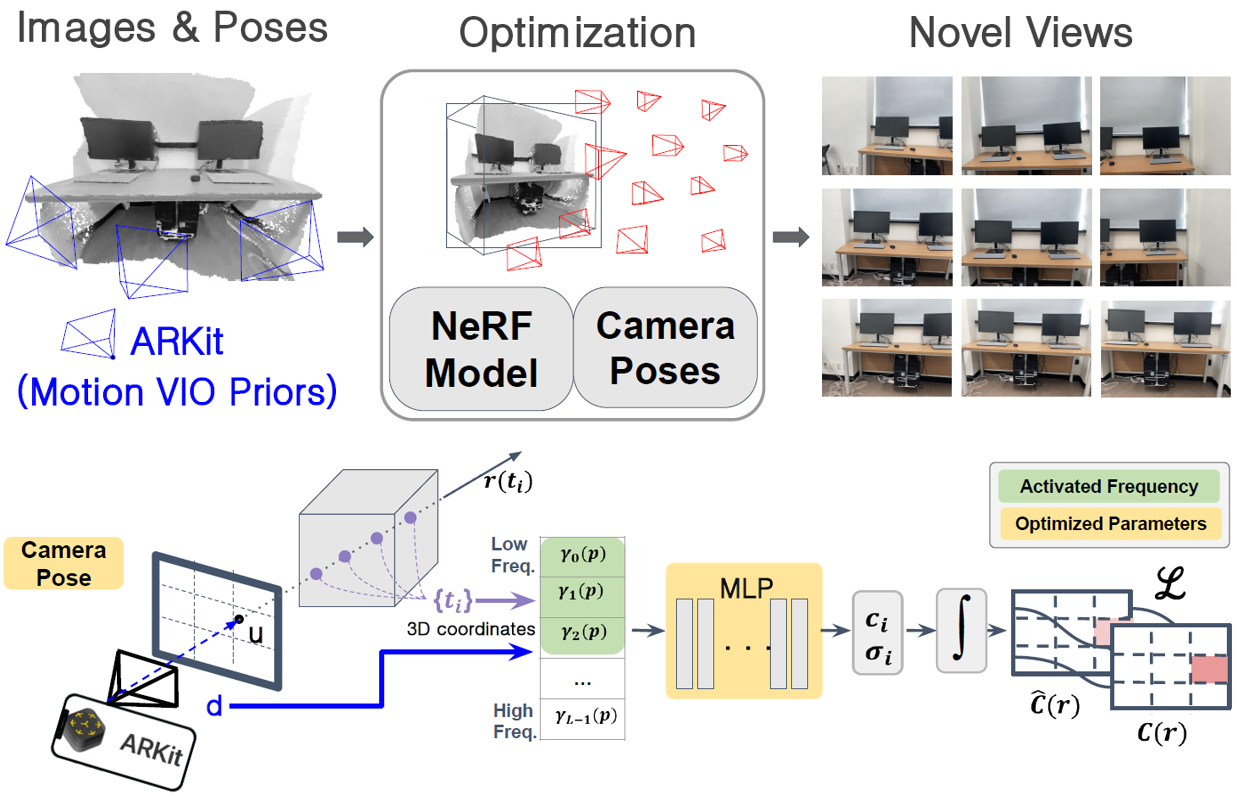
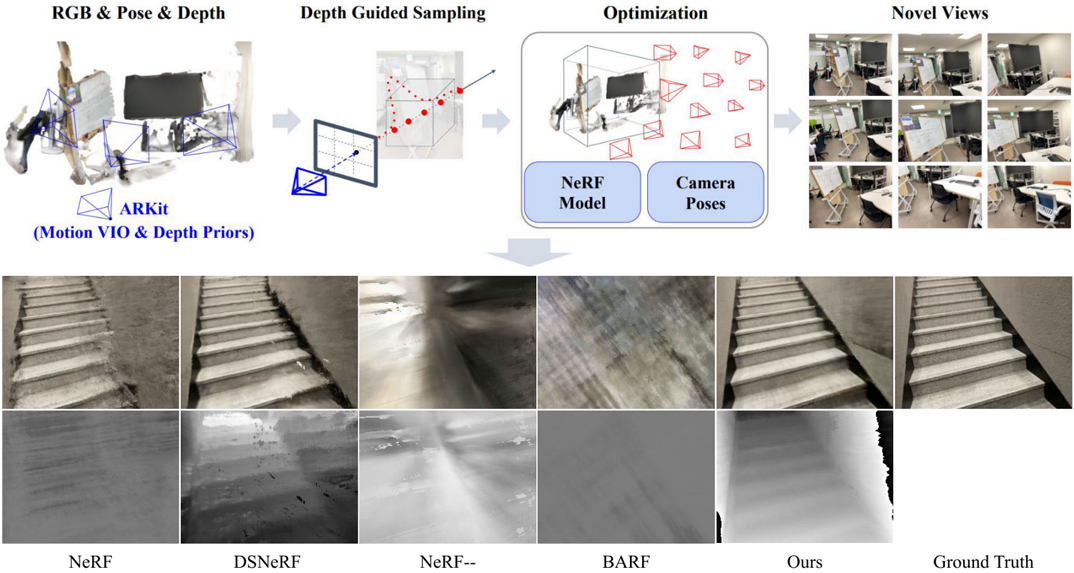 Complex-Motion NeRF: Joint Reconstruction and Pose Optimization With Motion and Depth PriorsIEEE Access, 2023[Paper]
Complex-Motion NeRF: Joint Reconstruction and Pose Optimization With Motion and Depth PriorsIEEE Access, 2023[Paper] -
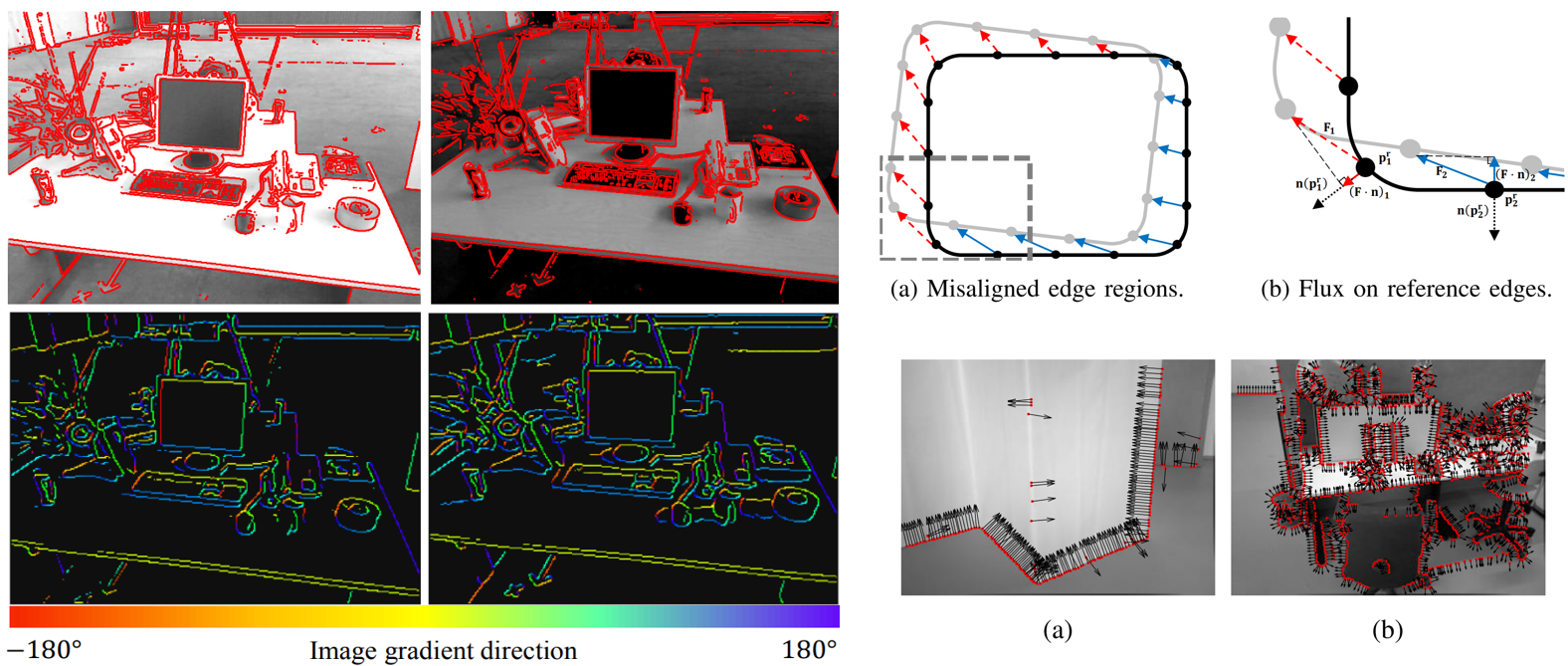
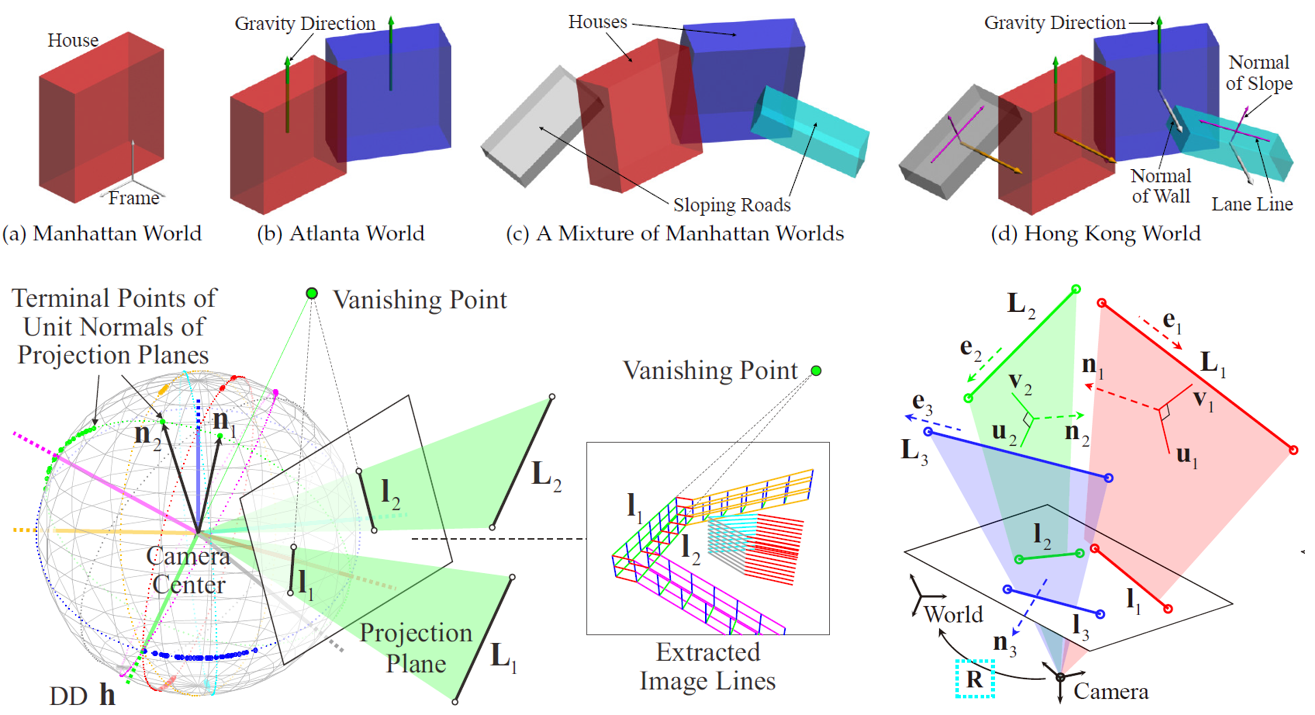 Hong Kong World: Leveraging Structural Regularity for Line-based SLAMIEEE Transactions on Pattern Analysis and Machine Intelligence (T-PAMI), 2023[Project Page] [Paper]
Hong Kong World: Leveraging Structural Regularity for Line-based SLAMIEEE Transactions on Pattern Analysis and Machine Intelligence (T-PAMI), 2023[Project Page] [Paper] -
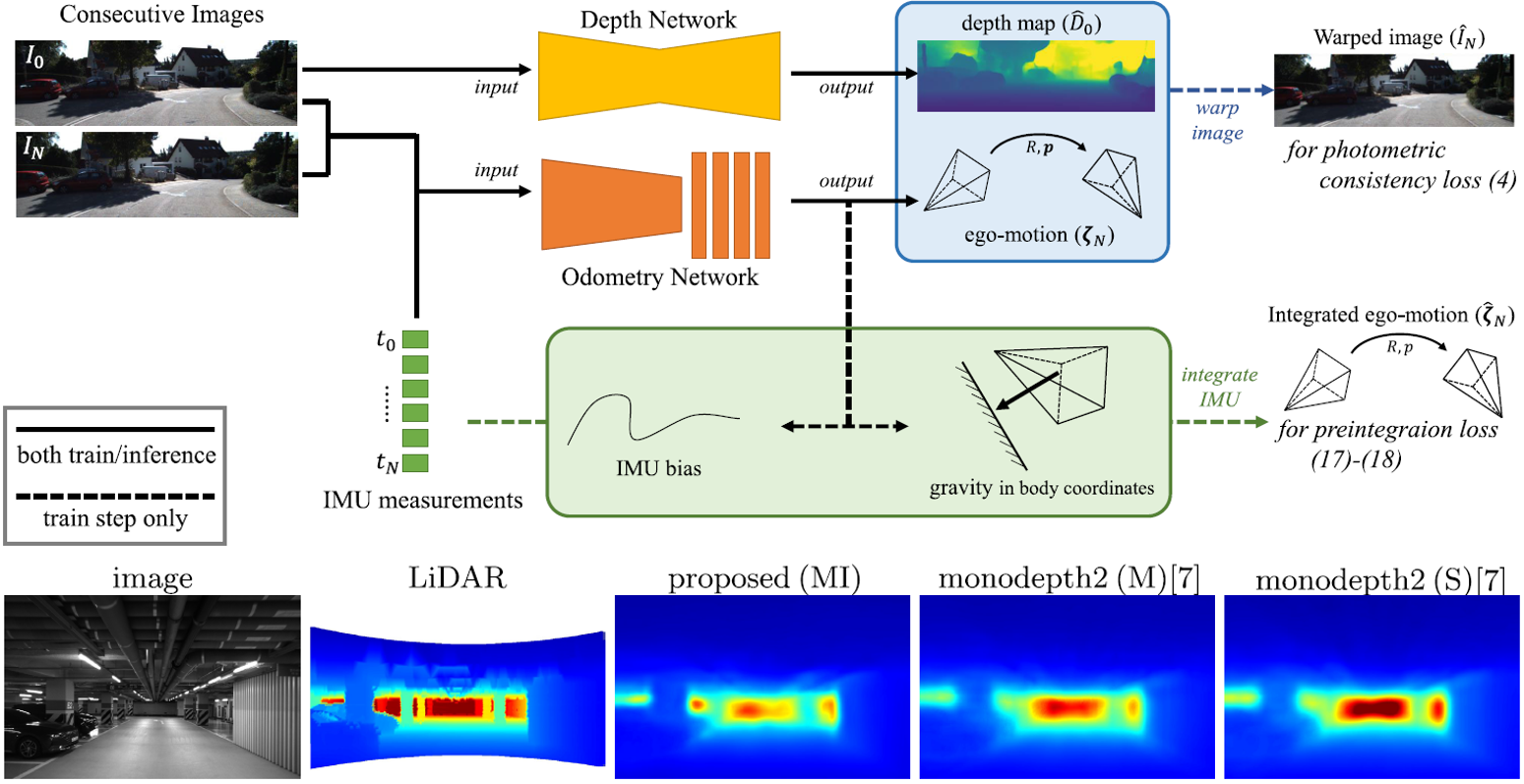 Scale-Aware Visual-Inertial Depth Estimation and Odometry Using Monocular Self-Supervised LearningIEEE Access, 2023[Paper]
Scale-Aware Visual-Inertial Depth Estimation and Odometry Using Monocular Self-Supervised LearningIEEE Access, 2023[Paper]
2022
-
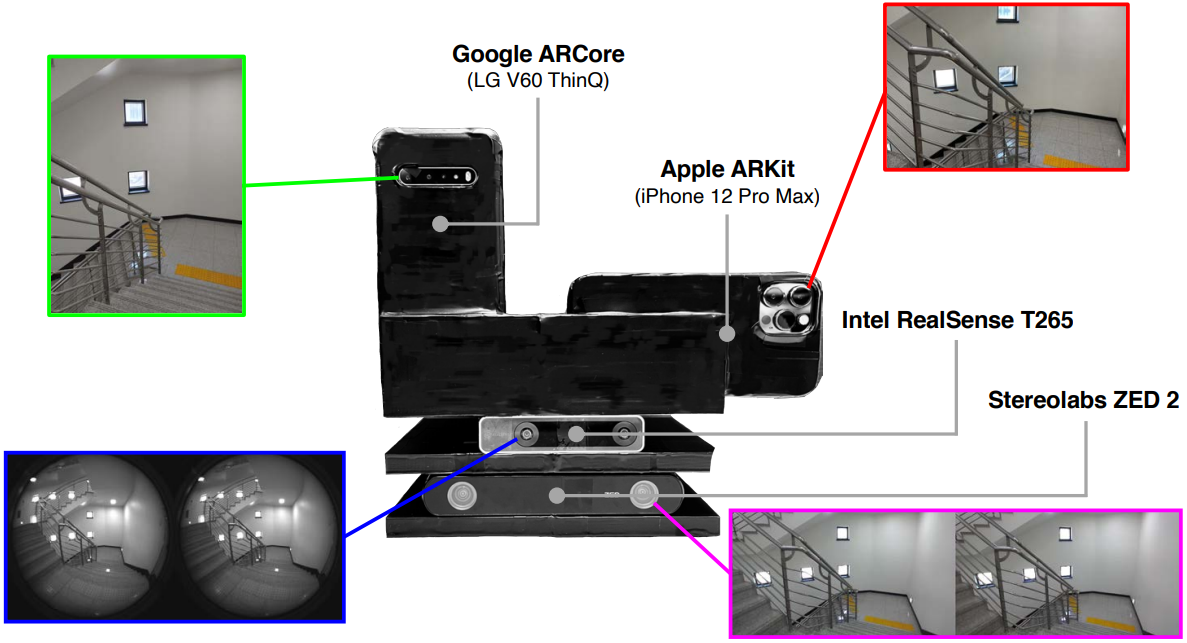 A Benchmark Comparison of Four Off-the-Shelf Proprietary Visual-Inertial Odometry SystemsMDPI Sensors, 2022[Paper]
A Benchmark Comparison of Four Off-the-Shelf Proprietary Visual-Inertial Odometry SystemsMDPI Sensors, 2022[Paper] -
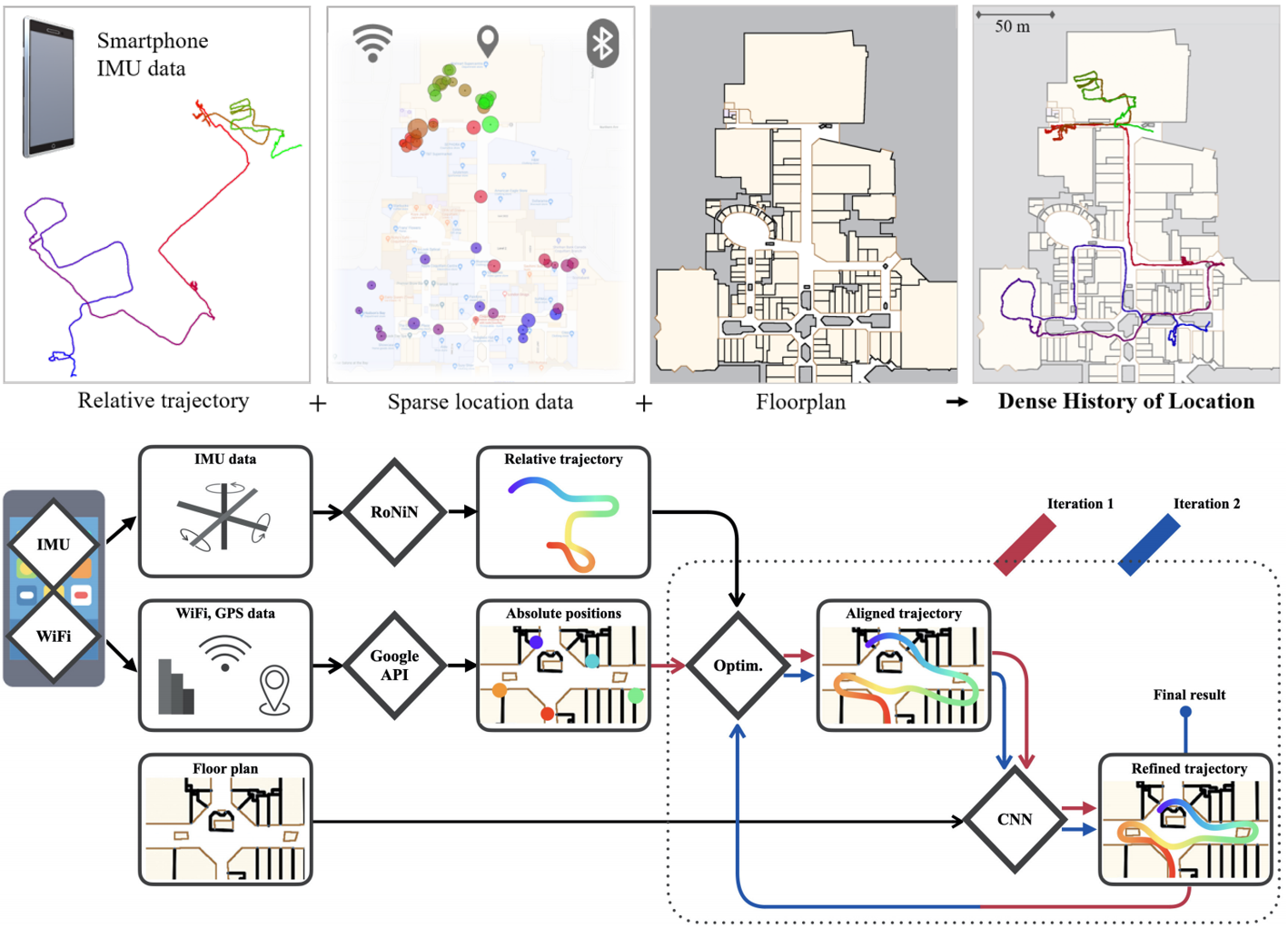
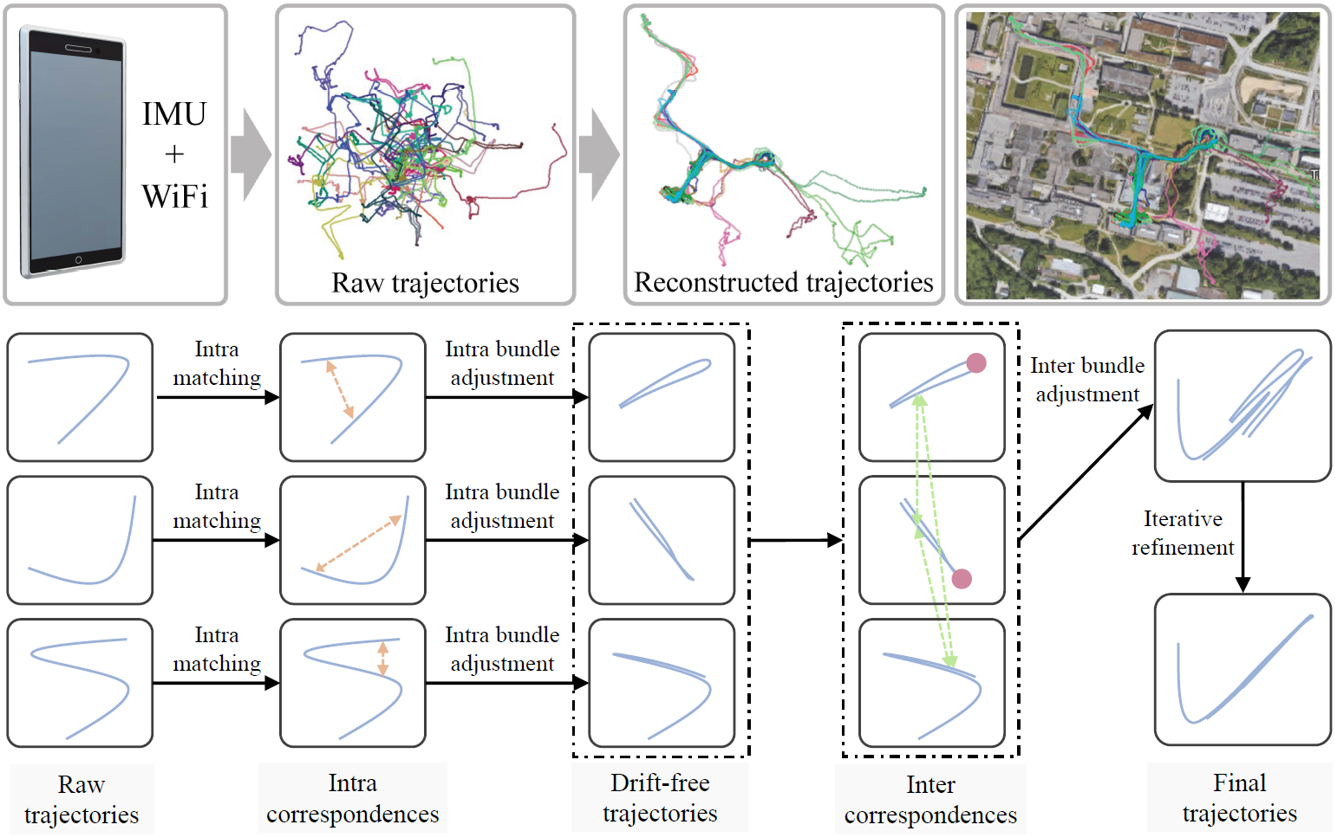 Single User WiFi Structure from Motion in the WildIn IEEE International Conference on Robotics and Automation (ICRA), 2022[Paper]
Single User WiFi Structure from Motion in the WildIn IEEE International Conference on Robotics and Automation (ICRA), 2022[Paper]
2021
-
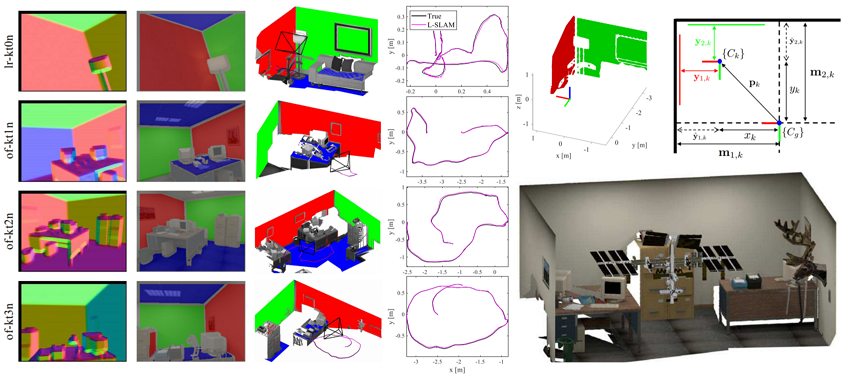
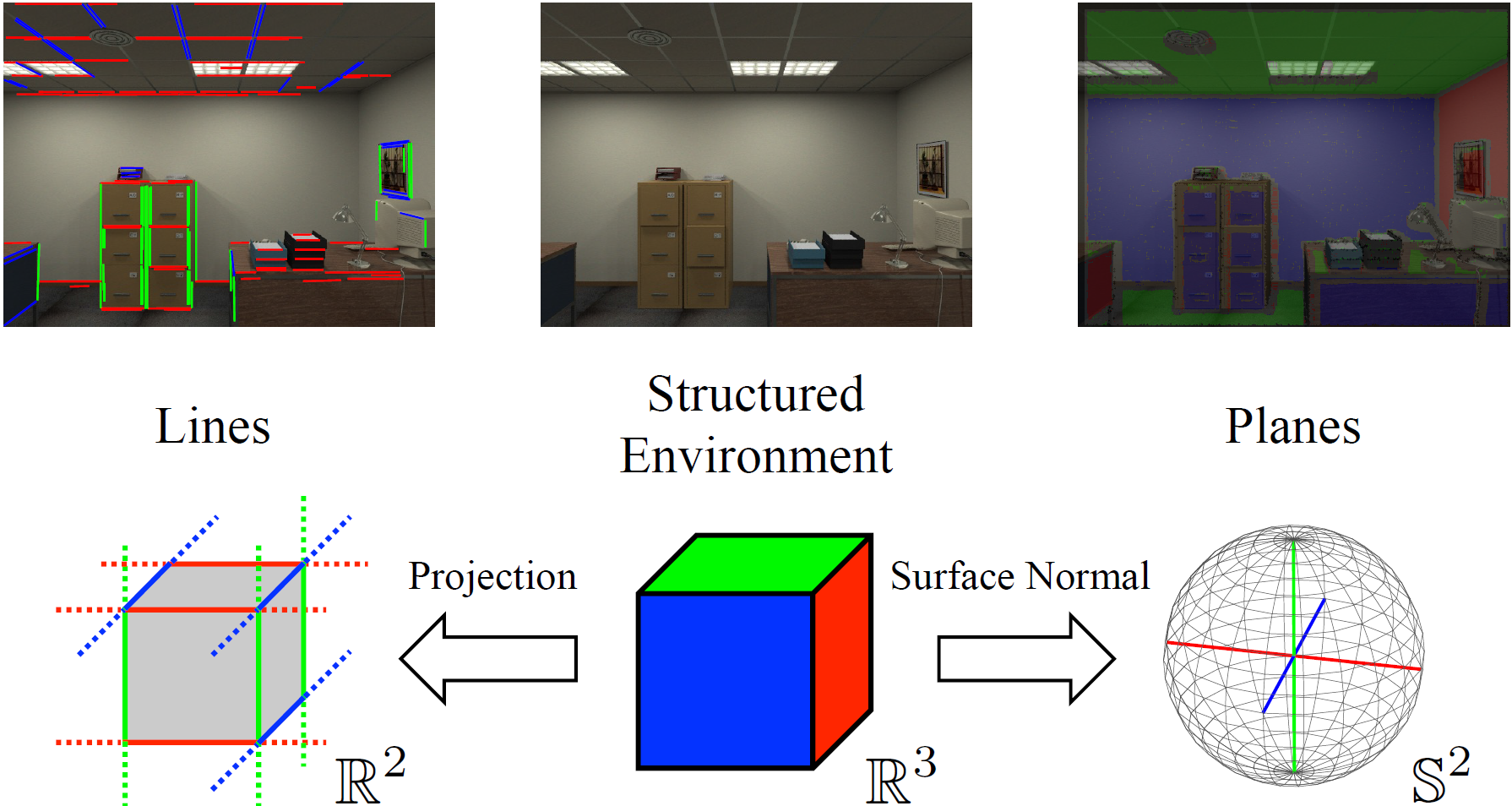
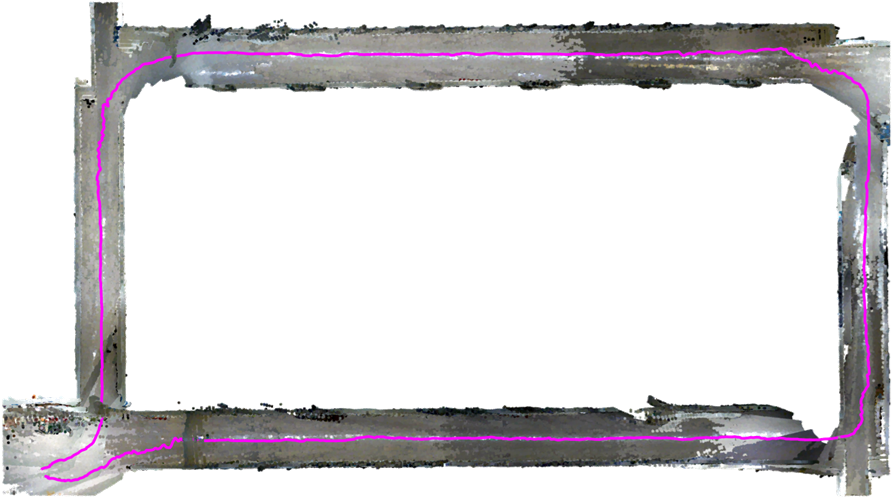
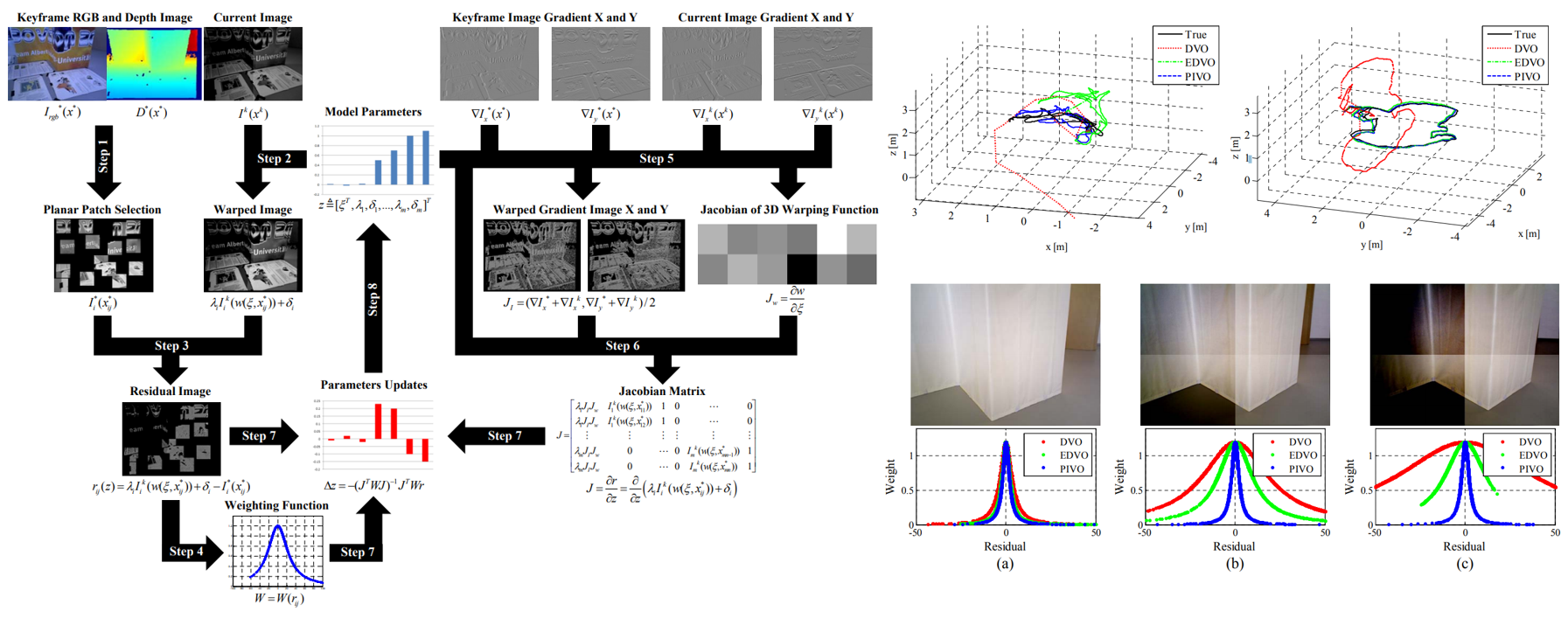
 Linear RGB-D SLAM for Structured EnvironmentsIEEE Transactions on Pattern Analysis and Machine Intelligence (T-PAMI), 2021[Paper]
Linear RGB-D SLAM for Structured EnvironmentsIEEE Transactions on Pattern Analysis and Machine Intelligence (T-PAMI), 2021[Paper] -
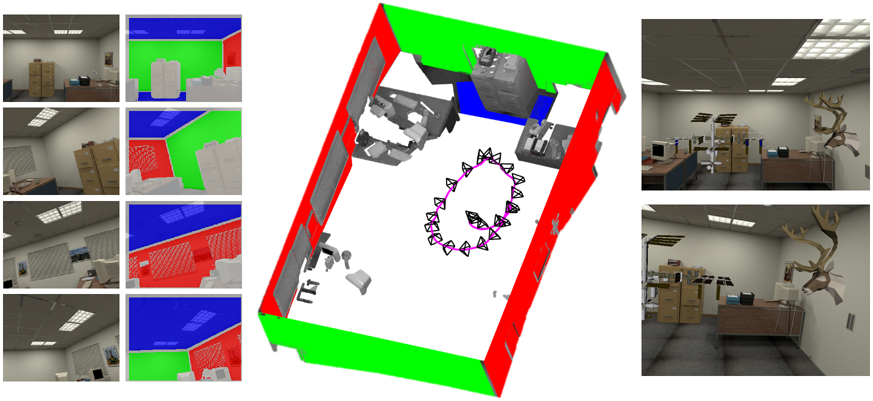
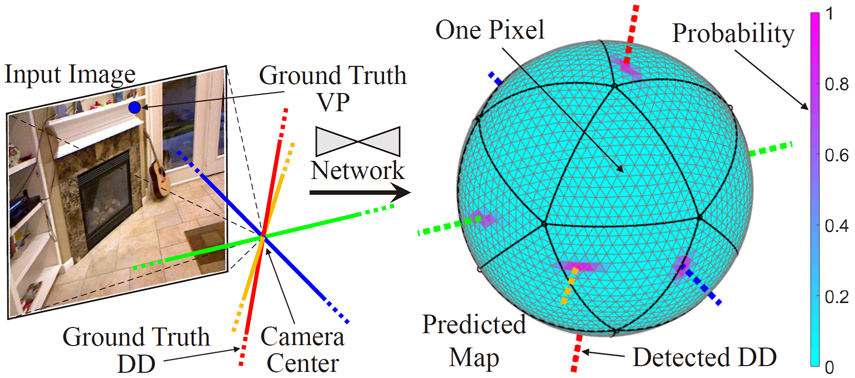 Learning Icosahedral Spherical Probability Map Based on Bingham Mixture Model for Vanishing Point EstimationIn IEEE/CVF International Conference on Computer Vision (ICCV), 2021[Paper]
Learning Icosahedral Spherical Probability Map Based on Bingham Mixture Model for Vanishing Point EstimationIn IEEE/CVF International Conference on Computer Vision (ICCV), 2021[Paper] -
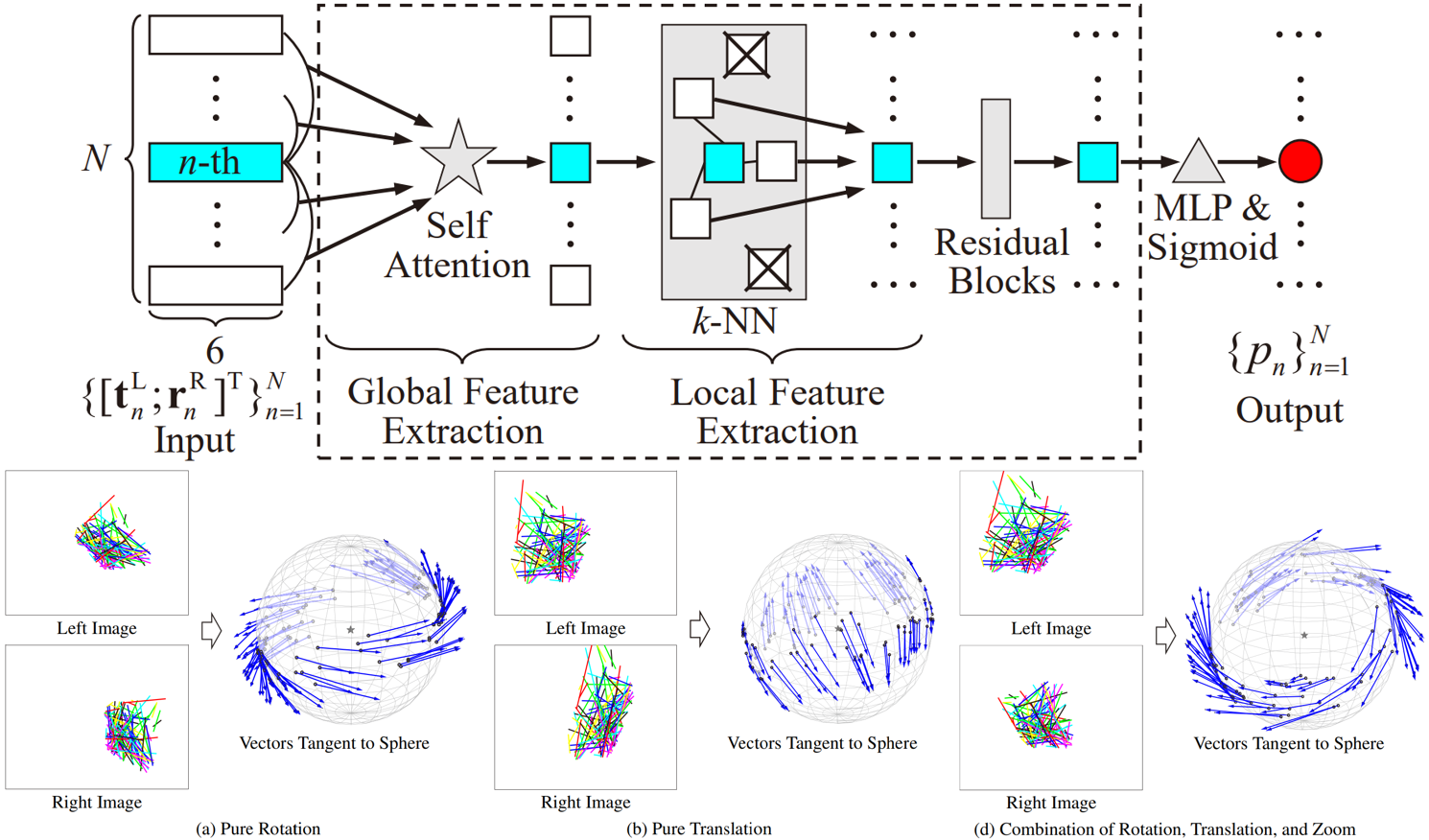 Learning to Identify Correct 2D-2D Line Correspondences on SphereIn IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2021[Project Page] [Paper]
Learning to Identify Correct 2D-2D Line Correspondences on SphereIn IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2021[Project Page] [Paper]
2020
-
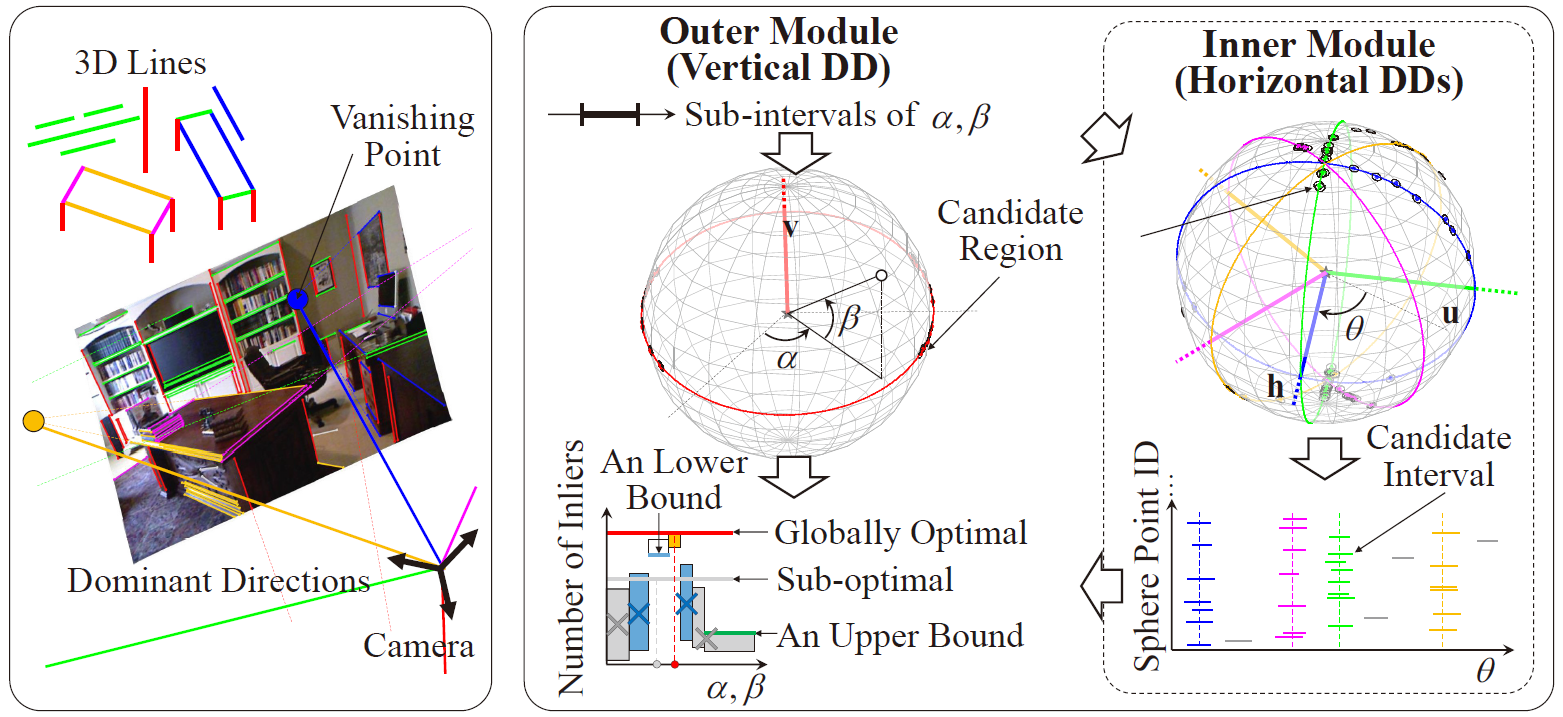 Globally Optimal and Efficient Vanishing Point Estimation in Atlanta WorldIn European Conference on Computer Vision (ECCV), 2020[Project Page] [Paper]
Globally Optimal and Efficient Vanishing Point Estimation in Atlanta WorldIn European Conference on Computer Vision (ECCV), 2020[Project Page] [Paper]
2014 – 2019
-
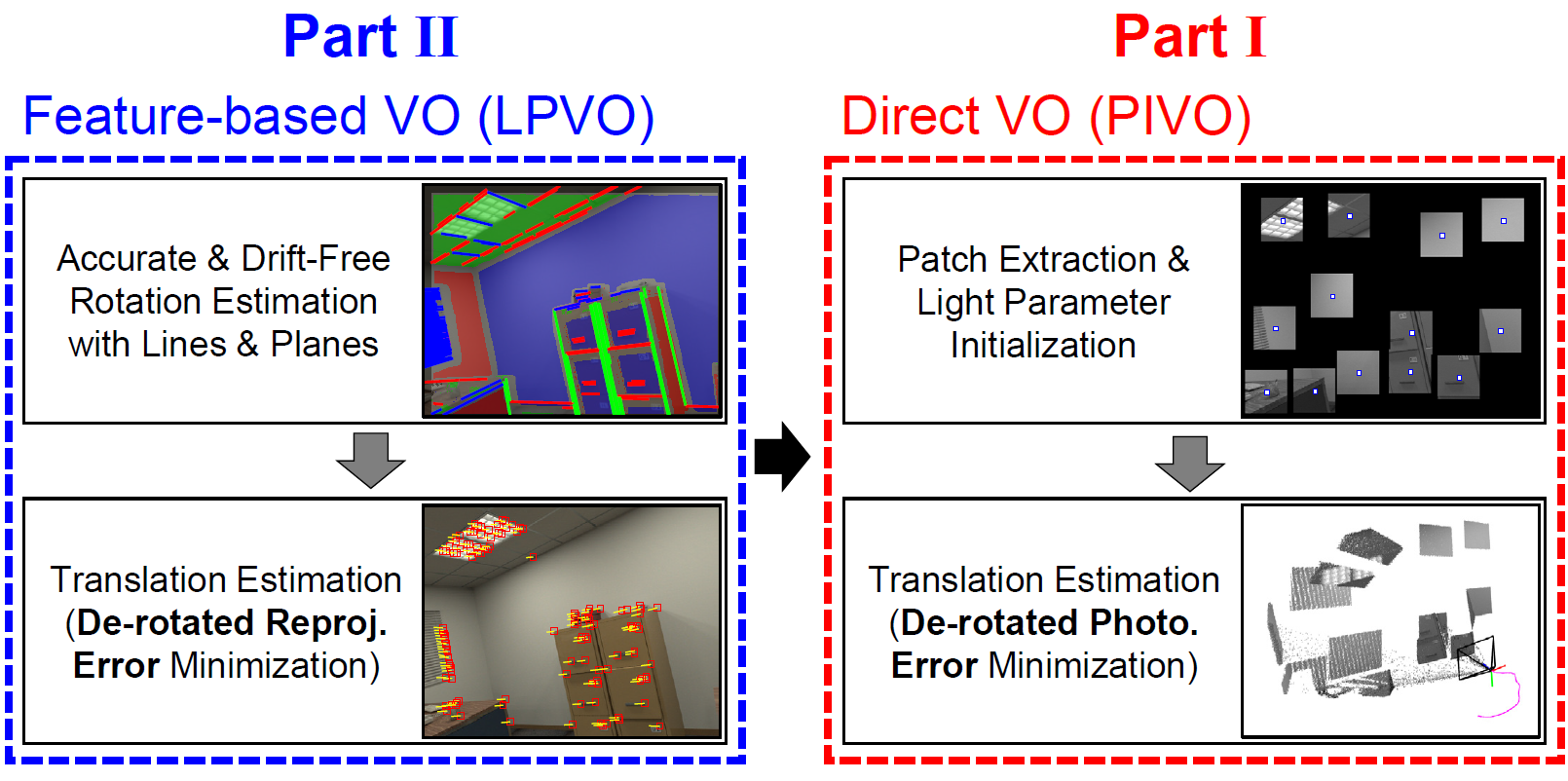 Pyojin Kim’s PhD Thesis: Low-Drift Visual Odometry for Indoor RoboticsSNU Department of Mechanical and Aerospace Engineering, 2019[Website]
Pyojin Kim’s PhD Thesis: Low-Drift Visual Odometry for Indoor RoboticsSNU Department of Mechanical and Aerospace Engineering, 2019[Website]